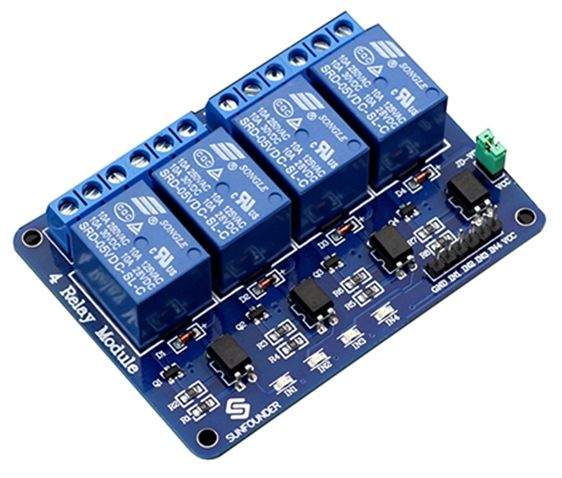
Um relé é um interruptor eletromecânico composto por uma bobina e um conjunto de contatos. Ao ser energizado, uma corrente percorre a bobina fazendo com que os seus contatos abram ou fechem.
O módulo apresentado aqui é um dispositivo com quatro canais independentes e é ativado com nível lógico baixo. Uma grande vantagem deste módulo é que cada canal utiliza um acoplador ótico, garantindo que não exista nenhum contato elétrico entre o pino da placa Arduino com o circuito de acionamento do relé.
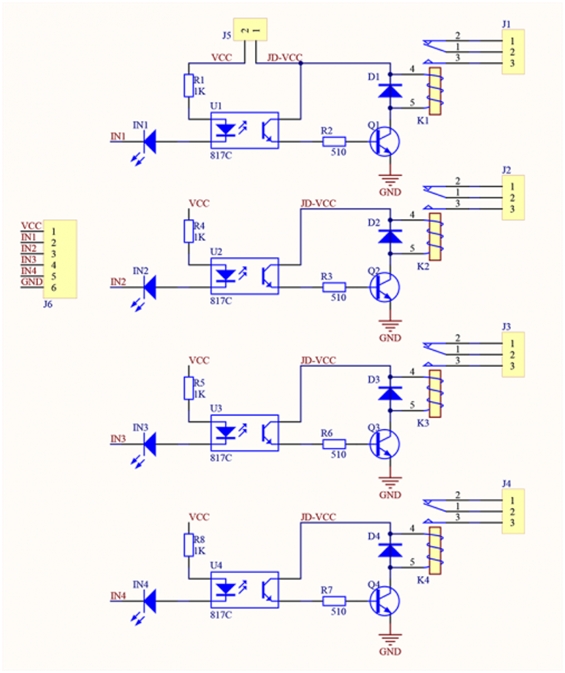
Quando o pino de entrada do canal (IN1 a IN4) vai ao nível lógico baixo (LOW) , o acoplador ótico (U1 a U4) conduz e aciona o transistor (Q1 a Q4) que por sua vez energiza a bobina do relé (K1 a K4) fechando os contatos 2 e 3. Parece confuso com muitos elementos 😀 , porém veja o esquema a seguir.
Teste do módulo
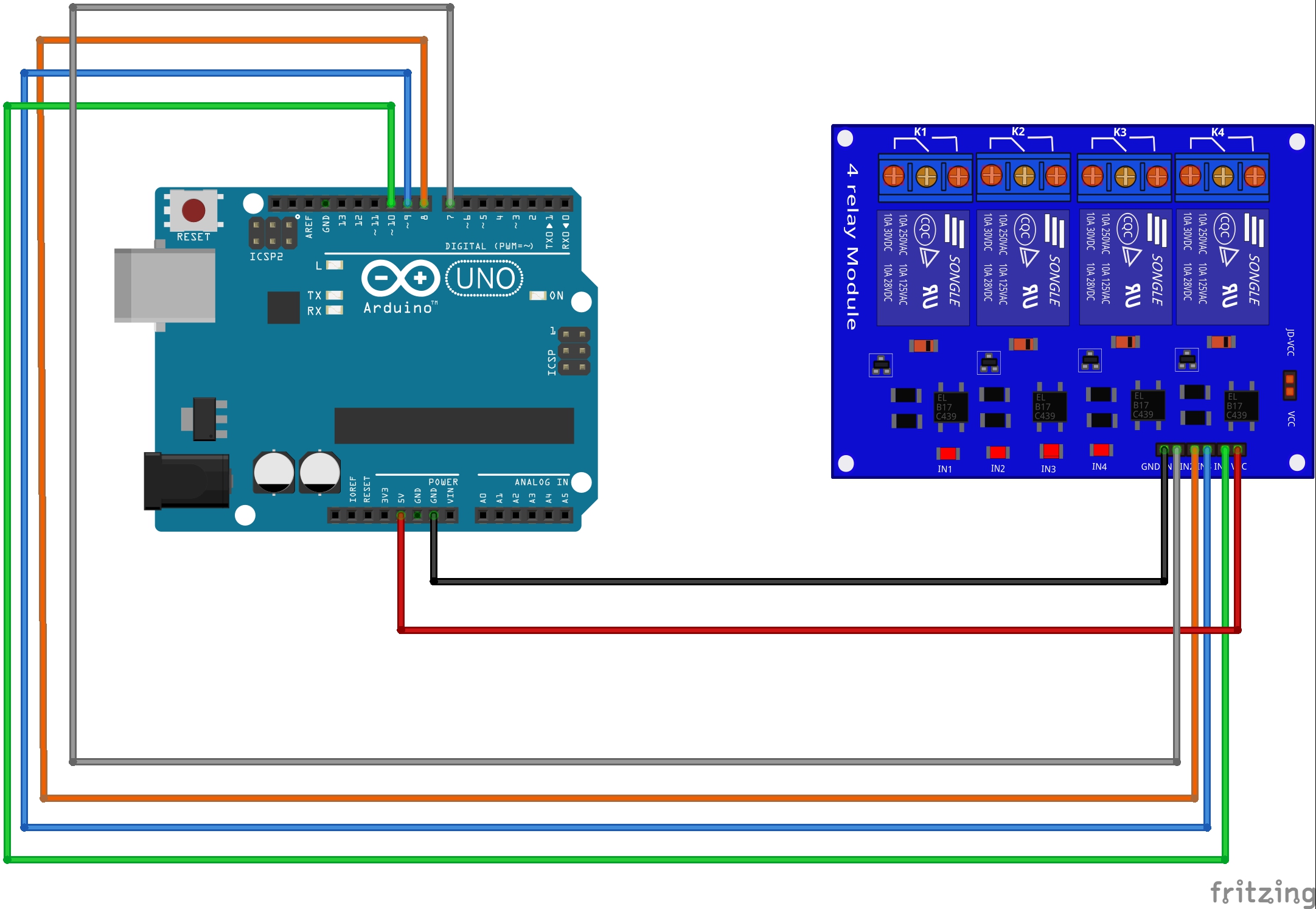
Monte o circuito abaixo observando os pinos de ligação.
pino módulo Relé
pino Arduino
IN1
D7
IN2
D8
IN3
D9
IN4
D10
VCC
5V
GND
GND
Aqui vamos criar dois arquivos: o rele.ino que é o código principal e o Rele.h (atente para o primeiro caractere maiúsculo) com a declaração das macros (#define) e a função de tratamento do módulo. A separação, na prática, não é necessária. Estamos sugerindo a separação para que o código seja o mais reutilizável possível. Deste modo você poderá utilizar um mesmo módulo em diversos projetos e ser poupado de escrever tudo novamente 😎 .
Obs.: toda diretiva de pré-processamento começa com o símbolo #. As diretivas não são comandos da linguagem C ou Arduino. São instruções que antes da compilação efetiva, são tratadas (processadas) no código fonte (sketch) e posteriormente entregues ao compilador. Ah, a sintaxe também difere dos comandos/declarações C/Arduino. Não temos o ponto e virgula (;) ao termino de uma diretiva. Por convenção, o nome das constantes da diretiva #define são escritas em maiúsculas.
Copie e cole no IDE do Arduino e salve como rele.ino
conteúdo revisto e atualizado – publicado originalmente em 2015
Estes módulos permitem adicionar um relógio em tempo real (RTC – Real Time Clock) aos seus projetos de uma forma bem simples e barata. Mesmo que falte energia ao seu Arduino, o relógio continua a contar pois é alimentado com uma bateria que pode durar muitos e muitos anos!
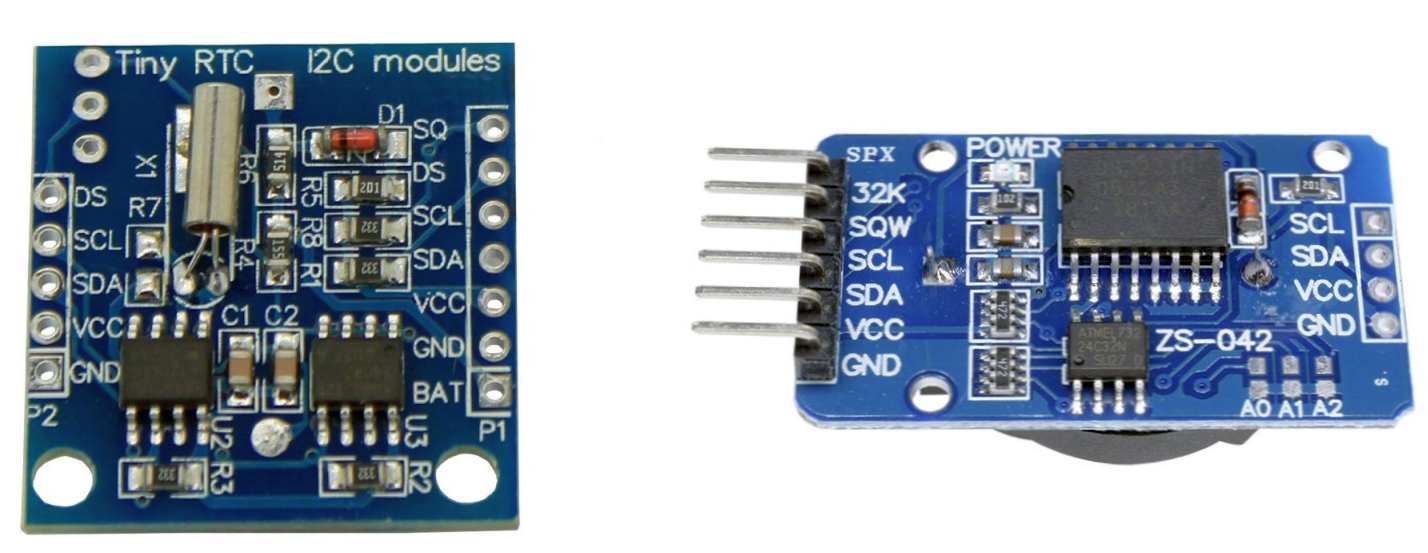
A maioria dos módulos RTC são equipados com os circuitos integrados DS1307 e DS3231 ambos da empresa californiana Maxim Integrated e utilizam o barramento de comunicação I2C.
DS1307 e DS3231
I2C
I2C (IIC – Inter Integrated Circuit) é um barramento de comunicação desenvolvido pela Philips, hoje NXP Semiconductors, para permitir troca de dados entre os componentes que residem na mesma placa de circuito impresso. Este barramento também é conhecido por TWI (Two Wire Interface) implementado pela ATMEL, hoje Microchip Technology.
A vantagem de usar este tipo de barramento é que precisamos de apenas dois pinos para comunicação, além do pino de alimentação (5V) e o pino terra (GND).
Os módulos I2C possuem um endereço único para cada módulo. A seleção do endereço é feita pela combinação dos pads A0, A1 e A2, para o DS3231 .
Mas como saber o endereço do módulo se não tenho a documentação disponível? 🙁
A biblioteca Wire.h (necessária para utilizar o I2C), contém um exemplo que faz uma varredura em módulos I2C acoplados a placa Arduino. Esta biblioteca é nativa no software Arduino, ou seja, não é preciso instalar.
Na comunicação I2C temos dois terminais conhecidos por SDA (Serial Data Line) e SCL (Serial Clock Line).
Nas placas Arduino Uno e compatíveis, o
SDA é o pino analógico 4 (A4)
e o
SCL é o pino analógico 5 (A5).
No Arduino Mega o SDA é o pino digital 20 e o SCL é o pino digital 21.
Conectando o módulo DS1307 (Tiny RTC)
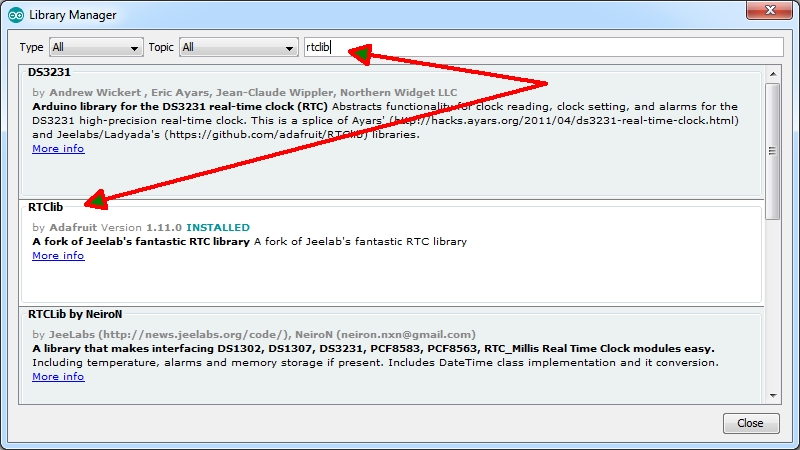
Primeiro verifique se você vai usar um módulo com um dos dois chips indicados no começo do artigo. Após, verifique se tem instalado a biblioteca RTClib.h (esta biblioteca serve para os dois modelos).
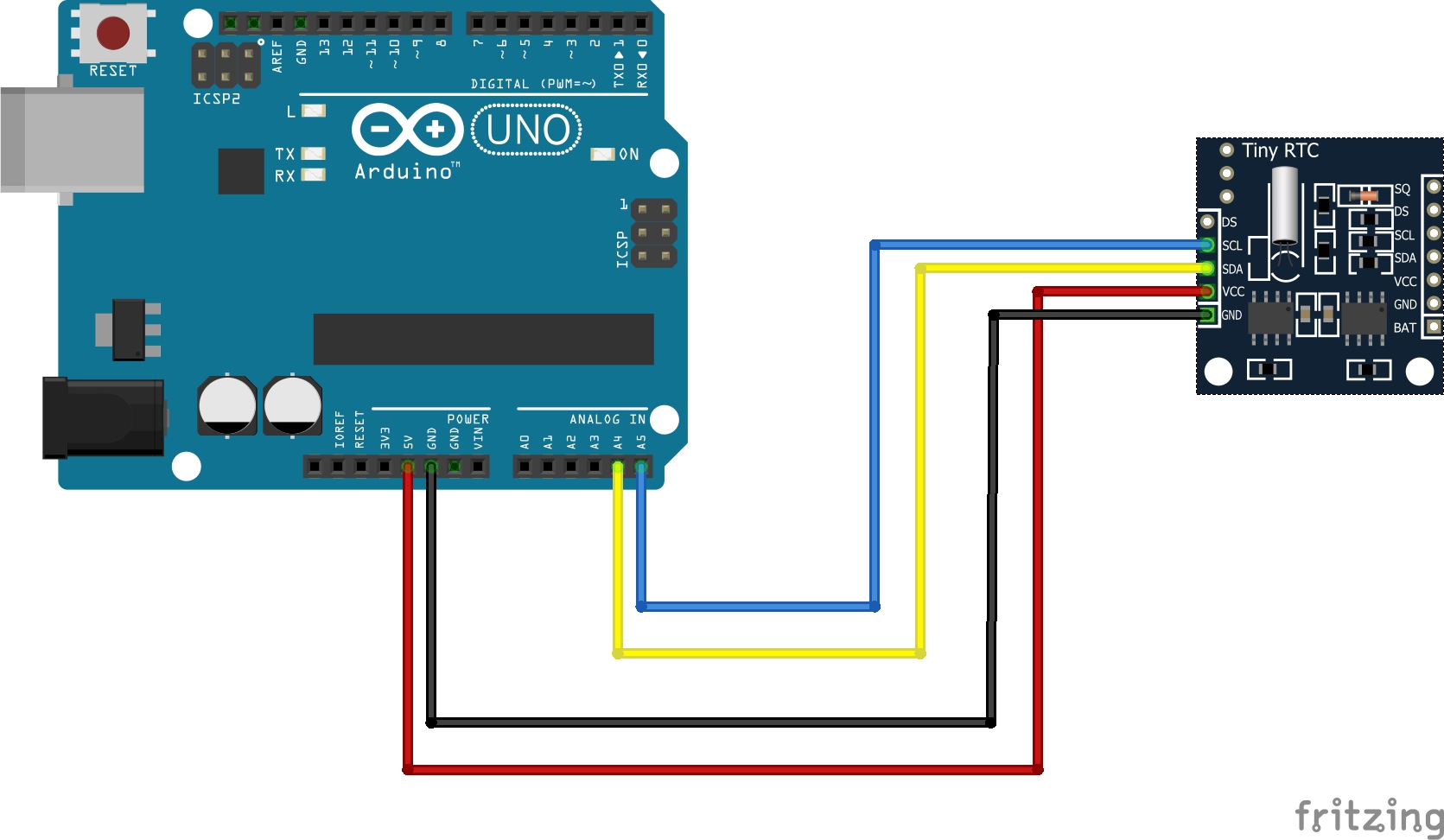
Monte o circuito orientando-se pela tabela a seguir:
pino Tiny RTC
pino Arduino
GND (jumper preto)
GND
VCC (jumper vermelho)
5V
SDA (jumper amarelo)
A4
SCL (jumper azul)
A5
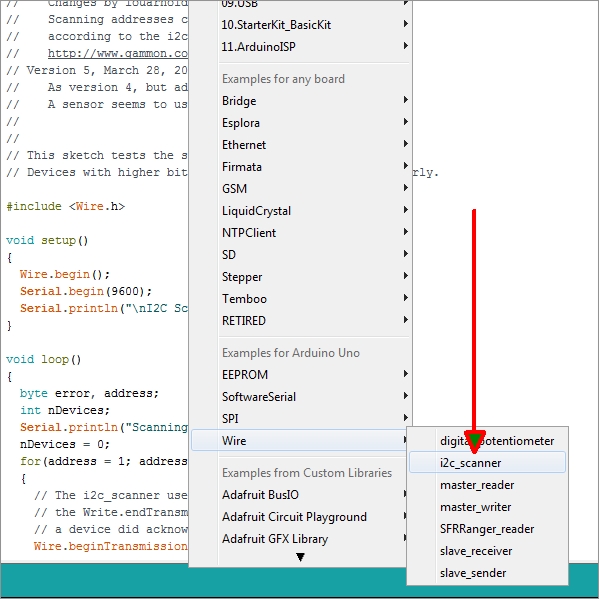
Agora iremos verificar o endereço do módulo. Carregue o IDE Arduino e acesse: menu File (Arquivo) e navegue até Examples (Exemplos), Wire e i2c_scanner. Execute o sketch e veja qual o endereço retornado no monitor serial.
Você deve ter visto esta informação:
Scanning… I2C device found at address 0x50 ! I2C device found at address 0x68 ! done
Foram exibidos dois endereços. Um é do chip DS1307 (0x68) e o outro da memória EEPROM (0x50). Este sketch é muito útil para identificar outros módulos que usam I2C.
Exemplos
É quase certo que o seu módulo novo está com a data e hora incorretas. Vamos fazer o ajuste e será necessário apenas uma vez, visto que o módulo contém uma bateria para mantê-lo funcionando.
O ajuste será feito utilizando duas macros da linguagem C: __DATE__ e __TIME__, que retornam respectivamente a data e hora do seu sistema operacional. Note que este recurso é válido somente em tempo de compilação do sketch. Não dá para colocar estas macros em um laço de repetição, por exemplo, e exibir valores atualizados. Sempre conterá o valor no momento da compilação.
Aqui temos os métodos:
begin() – retorna false caso não seja detectado um módulo RTC ou o seu endereço é inválido.
adjust() – grava data e hora no seguinte formato ano (AAAA), mês (MM), dia (DD), hora (HH), minuto (MM) e segundo (SS). A classe DateTime formata os valores das macros __DATE__ e __TIME__ corretamente para este método.
now() – retorna data e hora corrente. Novamente usamos a classe DateTime que monta uma estrutura com os seguintes métodos: day(), month(), year(), hour(), minute() e second().
#include <Wire.h>;
#include <RTClib.h>;
RTC_DS1307 rtc;
void setup() {
Serial.begin(9600);
delay(1000);
if (rtc.begin()) {
rtc.adjust(DateTime((__DATE__), (__TIME__)));
DateTime now = rtc.now();
int dia = now.day();
int mes = now.month();
int ano = now.year();
int hora = now.hour();
int minuto = now.minute();
int segundo = now.second();
Serial.print(dia);
Serial.print("/");
Serial.print(mes);
Serial.print("/");
Serial.print(ano);
Serial.print("\t");
Serial.print(hora);
Serial.print(":");
Serial.print(minuto);
Serial.print(":");
Serial.print(segundo);
}
else {
Serial.println("Modulo RTC nao encontrado!");
}
}
void loop() {
}
No próximo exemplo vamos formatar os dados retornados pelo módulo .
Foram inicializados três vetores: um para armazenar o texto formatado, um contendo os dias da semana e o último contendo os meses do ano.
Os dados foram formatados com a função sprintf() da linguagem C. Aliás, temos um mini curso de linguagem C que acreditamos seja útil para um melhor entendimento da linguagem Arduino. Não deixe de fazê-lo 😉
Mais um método utilizado:
dayOfTheWeek() – retorna um inteiro (0 a 6) que representa o dia da semana começando em 0 (domingo).
#include <Wire.h>
#include <RTClib.h>
RTC_DS1307 rtc;
void setup() {
char texto[255];
char diasDaSemana[7][10] = {
"Domingo",
"Segunda",
"Terca",
"Quarta",
"Quinta",
"Sexta",
"Sabado"
};
char mesDoAno[13][10] = {
"",
"Janeiro",
"Fevereiro",
"Marco",
"Abril",
"Maio",
"Junho",
"Julho",
"Agosto",
"Setembro",
"Outubro",
"Novembro",
"Dezembro"
};
Serial.begin(9600);
delay(1000);
if (rtc.begin()) {
DateTime now = rtc.now();
int dia = now.day();
int mes = now.month();
int ano = now.year();
int hora = now.hour();
int minuto = now.minute();
int segundo = now.second();
sprintf(texto, "Hoje: %s, %02d/%02d/%04d Hora: %02d:%02d:%02d",
diasDaSemana[now.dayOfTheWeek()], dia, mes, ano, hora, minuto, segundo);
Serial.println(texto);
sprintf(texto, "Hoje: %s, %02d/%s/%04d Hora: %02d:%02d:%02d",
diasDaSemana[now.dayOfTheWeek()], dia, mesDoAno[mes], ano, hora, minuto, segundo);
Serial.println(texto);
}
else {
Serial.println("Modulo RTC nao encontrado!");
}
}
void loop() {
}
A saída no monitor serial será a data e hora do dia que você executou este sketch:
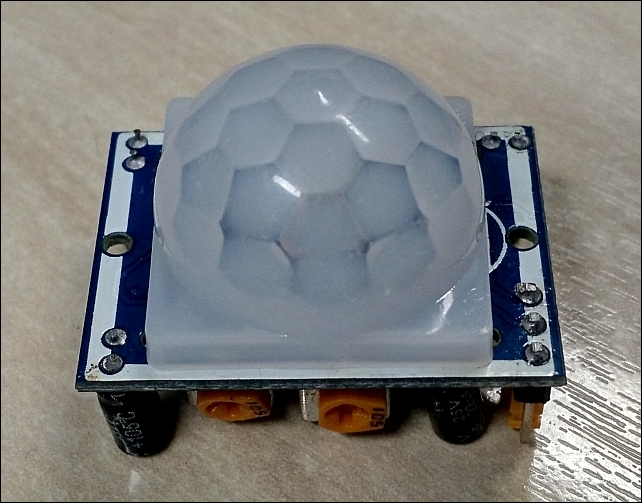
Sensores de presença ou movimento, conhecidos como sensores IR (infravermelho) ou PIR (Passive Infrared Sensor ou Pyroelectric Infrared Sensor), são sensores que detectam radiação emitida pelo corpo humano, por exemplo.
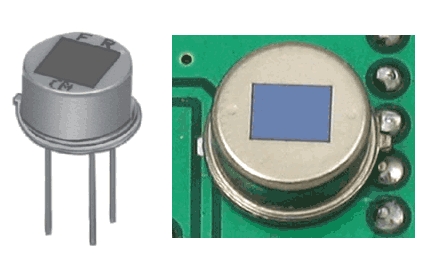
O elemento sensor é vedado e oferece grande imunidade a umidade e temperatura e sua área exposta deixa passar somente radiação infravermelha. O circuito ao redor dá suporte a leitura do sensor e posterior conversão em um sinal digital. Portanto, na saída deste sensor teremos um nível alto, quando da detecção do movimento e um nível baixo em estado de repouso.
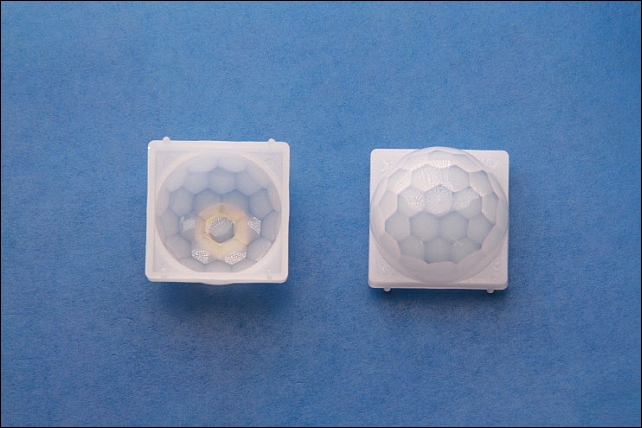
A lente (que cobre o elemento sensor) é do tipo Fresnel, feita de plástico, cuja função é ampliar o ângulo de detecção e concentração dos raios infravermelhos.
fonte http://www.fresnelfactory.com
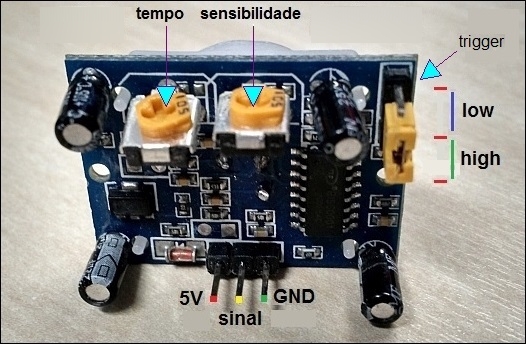
Pinos e Ajustes
Não é crítico mas requer um pouco de tempo para ajustar as suas necessidades.
Pinos:
5V = ligar no pino 5V da placa Arduino
sinal = ligar em qualquer pino digital da placa Arduino
GND = ligar no pino GND da placa Arduino
Ajustes:
tempo (trimpot) = no sentido horário, aumenta o delay (tempo que o sinal ficará em nível alto) para aproximadamente 5 minutos e no sentido anti-horário para aproximadamente 5 segundos.
sensibilidade (trimpot) = no sentido horário, aumenta a distância de detecção para aproximadamente 7 metros e no sentido contrário para aproximadamente 3 metros.
trigger (jumper) low – não repetitivo: quando alguém é detectado, um nível alto ficará presente no pino digital até que o tempo se esgote, daí o nível muda para baixo por aproximadamente 3 segundos, não aceitando novas detecções neste período. high – repetitivo: quando em nível alto, ficará neste estado enquanto o sensor detectar alguém no ambiente (dentro do tempo ajustado, porém o tempo será renovado a cada detecção) até que não haja movimento, daí alterando o nível para baixo por aproximadamente 3 segundos, não aceitando novas detecções neste período.
Um pouco confuso, não? 🙂 A melhor forma de entender estes ajustes é fazer experiências com a montagem sugerida mais adiante.
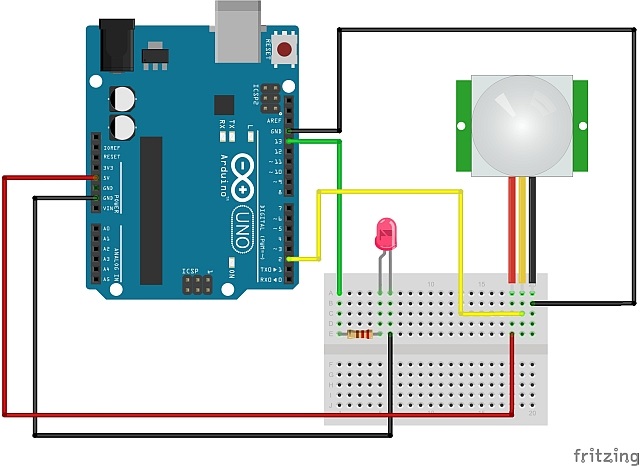
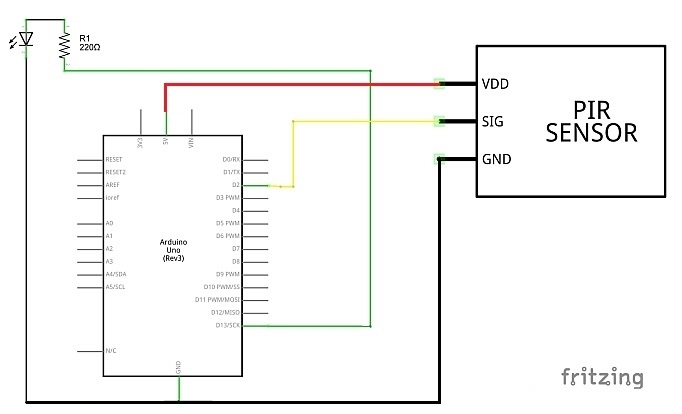
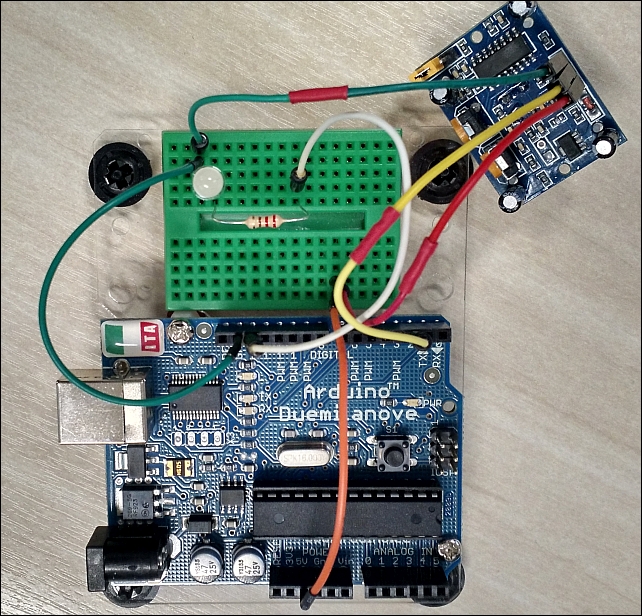
Montagem do circuito
Nos testes/experiências com este sensor, deixamos os trimpots posicionados no sentido máximo anti-horário e o jumper do modo trigger em high. A nossa sugestão é deixar inicialmente desta forma e ir ajustando conforme a sua necessidade. O LED, neste período de ajuste, terá grande importância para nos orientar quando sensor estiver em nível alto. O pino de sinal do PIR está conectado ao pino digital 2 do Arduino e o LED está conectado ao pino 13 digital do Arduino através de um resistor de 220Ω.